

ມັນໄດ້ຖືກເຊື່ອວ່າໂດຍທົ່ວໄປແລ້ວຖ້າຫາກວ່າການຕັ້ງຄ່າອຸປະກອນຂັບ conveyor ສາຍແອວແມ່ນສູງເກີນໄປ, ມັນເປັນການເສຍຊັບພະຍາກອນ. ຢ່າງໃດກໍ່ຕາມ, ສໍາລັບອຸປະກອນຂະຫນາດໃຫຍ່, ຖ້າມັນຕ່ໍາເກີນໄປ, ມັນຈະເຮັດໃຫ້ຄວາມກົດດັນແບບເຄື່ອນໄຫວເພີ່ມຂຶ້ນເມື່ອສາຍແອວເລີ່ມຕົ້ນ, ແລະແມ້ກະທັ້ງເຮັດໃຫ້ສາຍແອວ resonate. ວິທີການເລືອກອຸປະກອນຂັບລົດຢ່າງສົມເຫດສົມຜົນແມ່ນກຸນແຈໃນການອອກແບບຂອງສາຍແອວ conveyor. ມັນຍັງເປັນບັນຫາສໍາຄັນໃນການອອກແບບທີ່ສົມເຫດສົມຜົນ, ການດໍາເນີນງານແມ່ນປົກກະຕິ, ແລະຄ່າໃຊ້ຈ່າຍໃນການຮັກສາແລະປະລິມານການບໍາລຸງຮັກສາແມ່ນຕໍ່າ. ບົດຄວາມນີ້ວິເຄາະຄໍາຮ້ອງສະຫມັກ, ຂໍ້ດີແລະຂໍ້ເສຍຂອງວິທີການຂັບລົດທົ່ວໄປຈໍານວນຫນຶ່ງສໍາລັບການກະສານອ້າງອີງ.

1. ມ້ວນໄຟຟ້າ
drums ໄຟຟ້າແບ່ງອອກເປັນ drums ໄຟຟ້າໃນຕົວແລະ drums ໄຟຟ້າພາຍນອກ. ຄວາມແຕກຕ່າງທີ່ ສຳ ຄັນລະຫວ່າງພວກມັນແມ່ນວ່າມໍເຕີຂອງ drum ໄຟຟ້າທີ່ຕິດຕັ້ງແມ່ນຕິດຕັ້ງຢູ່ໃນ drum, ໃນຂະນະທີ່ມໍເຕີຂອງ drum ໄຟຟ້າພາຍນອກໄດ້ຖືກຕິດຕັ້ງຢູ່ນອກ drum ແລະຖືກເຊື່ອມຕໍ່ຢ່າງແຫນ້ນຫນາກັບ drum.
drum ໄຟຟ້າໃນຕົວມີການກະຈາຍຄວາມຮ້ອນທີ່ບໍ່ດີເພາະວ່າມໍເຕີໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນ drum. ມັນຖືກນໍາໃຊ້ໂດຍທົ່ວໄປກ່ຽວກັບສາຍແອວ conveyors ທີ່ມີພະລັງງານຫນ້ອຍກ່ວາ 30kw ແລະຄວາມຍາວຫນ້ອຍກ່ວາ 150m. ເນື່ອງຈາກວ່າມໍເຕີໄດ້ຖືກຕິດຕັ້ງຢູ່ນອກ drum, drum ໄຟຟ້າພາຍນອກມີການລະບາຍຄວາມຮ້ອນທີ່ດີກວ່າ. ມັນຖືກນໍາໃຊ້ໂດຍທົ່ວໄປກ່ຽວກັບສາຍແອວ conveyors ທີ່ມີພະລັງງານຫນ້ອຍກ່ວາ 45kw ແລະຄວາມຍາວຫນ້ອຍກ່ວາ 150m.
ຂໍ້ໄດ້ປຽບ: ໂຄງປະກອບການຫນາແຫນ້ນ, ຄ່າໃຊ້ຈ່າຍໃນການບໍາລຸງຮັກສາຕ່ໍາ, ຄວາມຫນ້າເຊື່ອຖືສູງ, ອຸປະກອນການຂັບລົດແລະ roller ສົ່ງແມ່ນປະສົມປະສານເຂົ້າໄປໃນຫນຶ່ງ.
ຂໍ້ເສຍ: ການປະຕິບັດການເລີ່ມຕົ້ນອ່ອນທີ່ບໍ່ດີ, ຜົນກະທົບອັນໃຫຍ່ຫຼວງຕໍ່ຕາຂ່າຍໄຟຟ້າໃນເວລາທີ່ມໍເຕີເລີ່ມຕົ້ນ. ຄວາມຫນ້າເຊື່ອຖືແມ່ນຮ້າຍແຮງກວ່າເກົ່າກ່ວາມໍເຕີປະເພດ Y + coupling + reducer drive method.
2. ໂຫມດຂັບລົດທີ່ບໍ່ດີຂອງມໍເຕີປະເພດ Y + coupling + reducer
ຂໍ້ໄດ້ປຽບ: ໂຄງປະກອບການງ່າຍດາຍ, ວຽກງານບໍາລຸງຮັກສາຂະຫນາດນ້ອຍ, ຄ່າໃຊ້ຈ່າຍບໍາລຸງຮັກສາຕ່ໍາແລະຄວາມຫນ້າເຊື່ອຖືສູງ.
ຂໍ້ເສຍ: ການປະຕິບັດການເລີ່ມຕົ້ນອ່ອນທີ່ບໍ່ດີ, ຜົນກະທົບອັນໃຫຍ່ຫຼວງຕໍ່ຕາຂ່າຍໄຟຟ້າໃນເວລາທີ່ມໍເຕີເລີ່ມຕົ້ນ. ໂດຍທົ່ວໄປແລ້ວການນໍາໃຊ້ສາຍແອວ conveyors ມີພະລັງງານຫນ້ອຍກ່ວາ 45kw ແລະຄວາມຍາວຂອງຫນ້ອຍກ່ວາ 150m.
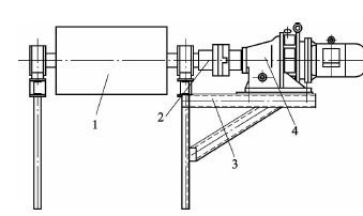
3. ມໍເຕີ Y-type + torque limiting coupling fluid + reducer
ມັນເປັນອຸປະກອນຂັບລົດທີ່ໃຊ້ກັນຢ່າງກວ້າງຂວາງໃນສາຍແອວ conveyors, ເຊິ່ງໂດຍທົ່ວໄປແມ່ນໃຊ້ໃນສາຍແອວ conveyors ທີ່ມີພະລັງງານດຽວຂອງຫນ້ອຍກວ່າ 630kw ແລະຄວາມຍາວຂອງຕ່ໍາກວ່າ 1500m.
ການເຊື່ອມສານຂອງແຫຼວທີ່ຈຳກັດສີ່ຫຼ່ຽມແມ່ນແບ່ງອອກເປັນຂໍ້ຕໍ່ຂອງແຫຼວທີ່ຈຳກັດສີ່ຫຼ່ຽມກັບຫ້ອງຊ່ວຍດ້ານຫຼັງ ແລະ ການເຊື່ອມຂອງແຫຼວທີ່ຈຳກັດສີ່ຫຼ່ຽມສີ່ຫຼ່ຽມໂດຍບໍ່ມີຫ້ອງຊ່ວຍດ້ານຫຼັງ. ເນື່ອງຈາກວ່າໃນອະດີດຊ້າເຂົ້າໄປໃນຮູເຮັດວຽກຂອງການເຊື່ອມຂອງນ້ໍາຜ່ານຮູ throttle ຜ່ານຫ້ອງການຊ່ວຍເຫຼືອດ້ານຫລັງໃນເວລາທີ່ມໍເຕີໄດ້ຖືກເລີ່ມຕົ້ນ, ການປະຕິບັດການເລີ່ມຕົ້ນຂອງມັນແມ່ນດີກ່ວາຂອງຫລັງ.
ຖ້າຫາກວ່າຫນຶ່ງທີ່ມີສະພາການຊ່ວຍດ້ານຫລັງໄດ້ຖືກເລືອກ, ໃນເວລາທີ່ທັງສອງແບບຂອງສາຍສົ່ງຂອງນ້ໍາສາມາດຕອບສະຫນອງພະລັງງານການສົ່ງຂອງຕົນ, ເນື່ອງຈາກການເລີ່ມຕົ້ນທີ່ຍາວນານແລະການຜະລິດຄວາມຮ້ອນຂະຫນາດໃຫຍ່ຂອງການເຊື່ອມຂອງນ້ໍາ, ປະເພດຂອງການເຊື່ອມນ້ໍາຂະຫນາດໃຫຍ່ຄວນຈະເປັນ.
ຖ້າຫາກວ່າຫນຶ່ງທີ່ບໍ່ມີສະພາການຊ່ວຍດ້ານຫລັງໄດ້ຖືກເລືອກ, ໃນເວລາທີ່ທັງສອງຕົວແບບຂອງສາຍສົ່ງຂອງນ້ໍາສາມາດຕອບສະຫນອງພະລັງງານການສົ່ງຂອງຕົນ, ປະເພດຂະຫນາດນ້ອຍຂອງ coupling ນ້ໍາຄວນຈະເປັນທີ່ມັກເນື່ອງຈາກວ່າທີ່ໃຊ້ເວລາເລີ່ມຕົ້ນຂອງ coupling ນ້ໍາແມ່ນສັ້ນແລະການຜະລິດຄວາມຮ້ອນມີຂະຫນາດນ້ອຍ.
ສໍາລັບສາຍແອວ conveyors ຂັບເຄື່ອນໂດຍ motors ຫຼາຍ, ຖ້າຫາກວ່າວິທີການຂັບນີ້ໄດ້ຖືກຄັດເລືອກ, ແນະນໍາໃຫ້ເລືອກເອົາການ coupling ນ້ໍາກັບຫ້ອງການຊ່ວຍເຫຼືອດ້ານຫລັງ torque ຈໍາກັດປະເພດຂອງການເຊື່ອມນ້ໍາ.
ຂໍ້ໄດ້ປຽບ: ລາຄາປະຫຍັດ, ໂຄງປະກອບການງ່າຍດາຍແລະຫນາແຫນ້ນ, ວຽກງານບໍາລຸງຮັກສາຂະຫນາດນ້ອຍ, ຄ່າໃຊ້ຈ່າຍໃນການຮັກສາຕ່ໍາ, ການ overload motor, ເມື່ອ motors ຫຼາຍໄດ້ຖືກຂັບເຄື່ອນ, ພະລັງງານ motor ສາມາດສົມດູນ, ການຊັກຊ້າເລີ່ມຕົ້ນສາມາດແບ່ງອອກເປັນສະຖານີ, ແລະຜົນກະທົບຕໍ່ຕາຂ່າຍໄຟຟ້າໃນເວລາທີ່ conveyor ສາຍແອວເລີ່ມຕົ້ນແມ່ນຫຼຸດລົງ, ຄວາມຫນ້າເຊື່ອຖືແມ່ນສູງ, ລາຄາແມ່ນຕ່ໍາ, ແລະເປັນຮູບແບບການຂັບລົດຫນ້ອຍກ່ວາ 10 ຄວາມຍາວຂອງ belt.
ຂໍ້ເສຍ: ການປະຕິບັດການເລີ່ມຕົ້ນອ່ອນແມ່ນບໍ່ດີ, ແລະມັນບໍ່ເຫມາະສົມກັບ conveyor ສາຍແອວທີ່ຈະນໍາໃຊ້ສໍາລັບສາຍແອວການຂົນສົ່ງຫຼຸດລົງ, ແລະສາຍແອວ conveyor ທີ່ຕ້ອງການການທໍາງານຂອງລະບຽບຄວາມໄວ.
4. ມໍເຕີ Y-type + speed-regulating fluid coupling + reducer
ວິທີການຂັບລົດທີ່ໃຊ້ທົ່ວໄປສໍາລັບເຄື່ອງລໍາລຽງສາຍແອວຂະຫນາດໃຫຍ່, ເຊິ່ງໂດຍທົ່ວໄປແລ້ວແມ່ນໃຊ້ໃນສາຍສົ່ງສາຍແອວຂະຫນາດໃຫຍ່ທີ່ມີຄວາມຍາວຫຼາຍກວ່າ 800 ແມັດ.
ຂໍ້ໄດ້ປຽບ: ໂຄງປະກອບການແມ່ນງ່າຍດາຍ, ວຽກງານບໍາລຸງຮັກສາ overload ມີຂະຫນາດນ້ອຍ, ມໍເຕີເລີ່ມຕົ້ນບໍ່ມີການໂຫຼດ, ມໍເຕີ overloaded, ເມື່ອ motors ຫຼາຍຖືກຂັບເຄື່ອນ, ມັນສາມາດຊັກຊ້າໃນການເລີ່ມຕົ້ນ, ຫຼຸດຜ່ອນຜົນກະທົບຂອງສາຍແອວສາຍສົ່ງໄຟຟ້າໃນເວລາທີ່ມັນເລີ່ມຕົ້ນ, ຄວາມຫນ້າເຊື່ອຖືແມ່ນສູງຂຶ້ນ, ການປະຕິບັດການເລີ່ມຕົ້ນອ່ອນແມ່ນດີກວ່າ, ແລະມັນມີການຄວບຄຸມການເລີ່ມຕົ້ນຂອງເສັ້ນໂຄ້ງສາມາດຄວບຄຸມໄດ້ - ເວລາເລີ່ມຕົ້ນ, ນັ້ນແມ່ນ. ສາມາດຄວບຄຸມໄດ້, ແລະລາຄາແມ່ນຕໍ່າ.
ຂໍ້ເສຍ: ໃນເວລາທີ່ການເຊື່ອມສານນ້ໍາໄດ້ຖືກເລີ່ມຕົ້ນ, ເນື່ອງຈາກວ່າການປ່ຽນແປງປະລິມານນ້ໍາມັນແລະເສັ້ນໂຄ້ງການປ່ຽນແປງຄວາມໄວຂອງທໍ່ການເຮັດວຽກຂອງສາຍເຊື່ອມຂອງນ້ໍາແມ່ນບໍ່ເປັນເສັ້ນແລະມີການຖອຍຫລັງ, ການຕອບສະຫນອງແບບເຄື່ອນໄຫວທີ່ຄວບຄຸມໄດ້ຊ້າ, ແລະມີຄວາມຫຍຸ້ງຍາກໃນການຄວບຄຸມວົງປິດ, ແລະບາງຄັ້ງມີການຮົ່ວໄຫລຂອງນ້ໍາມັນ. ມັນບໍ່ເຫມາະສົມສໍາລັບ conveyor ສາຍແອວ downward, ແລະ conveyor ສາຍແອວທີ່ມີຫນ້າທີ່ຄວບຄຸມຄວາມໄວແມ່ນຕ້ອງການ.

5. ມໍເຕີປະເພດ Y + ອຸປະກອນຂັບ CST
Y-type motor + CST drive device is designed for belt conveyor by Dodge Company of the United States, ມີຄວາມຫນ້າເຊື່ອຖືສູງຂອງອຸປະກອນການຂັບ mechatronics, ໂດຍທົ່ວໄປແລ້ວການນໍາໃຊ້ໃນໄລຍະຍາວສາຍແອວ conveyor ຂະຫນາດໃຫຍ່ທີ່ມີຄວາມຍາວຫຼາຍກ່ວາ 1000m.
ຂໍ້ໄດ້ປຽບ: ການປະຕິບັດການເລີ່ມຕົ້ນອ່ອນທີ່ດີ, ເສັ້ນໂຄ້ງຄວາມໄວທີ່ສາມາດຄວບຄຸມໄດ້ໃນເວລາເລີ່ມຕົ້ນ, ເສັ້ນໂຄ້ງຄວາມໄວສາມາດຄວບຄຸມໄດ້ໃນເວລາຈອດລົດ, ການຄວບຄຸມວົງປິດສາມາດເຮັດໄດ້, ການເລີ່ມຕົ້ນຂອງມໍເຕີບໍ່ມີການໂຫຼດ, ໂຄງປະກອບການງ່າຍດາຍ, ການບໍາລຸງຮັກສາຂະຫນາດນ້ອຍ, ເມື່ອ motors ຫຼາຍຖືກຂັບເຄື່ອນ, ມັນສາມາດຊັກຊ້າໃນການເລີ່ມຕົ້ນໃນຂັ້ນຕອນ, ແລະຫຼຸດຜ່ອນຜົນກະທົບຂອງສາຍແອວສາຍສົ່ງໄຟຟ້າໃນເວລາເລີ່ມຕົ້ນ.
ຂໍ້ເສຍ: ຄວາມຕ້ອງການສູງສໍາລັບພະນັກງານບໍາລຸງຮັກສາແລະນ້ໍາມັນຫລໍ່ລື່ນ, ລາຄາອຸປະກອນສູງ. ມັນບໍ່ເຫມາະສົມສໍາລັບ conveyor ສາຍແອວ downward, ແລະ conveyor ສາຍແອວທີ່ມີຫນ້າທີ່ຄວບຄຸມຄວາມໄວແມ່ນຕ້ອງການ.
6. ມໍເຕີ winding + reducer
ມີສາມຮູບແບບການຄວບຄຸມຂອງ motor winding + reducer:
ປະເພດທໍາອິດ: ບາດແຜ motor string ຄວາມຖີ່ resistor ຫຼືນ້ໍາ;
ບໍ່ມີຫນ້າທີ່ຄວບຄຸມຄວາມໄວ, ແລະມໍເຕີບໍ່ສາມາດເລີ່ມຕົ້ນໄດ້ເລື້ອຍໆ, ໂດຍທົ່ວໄປແລ້ວການນໍາໃຊ້ສາຍແອວ conveyor ທີ່ມີຄວາມຍາວຫຼາຍກ່ວາ 500m ແລະມໍເຕີບໍ່ໄດ້ເລີ່ມຕົ້ນເລື້ອຍໆ.
ປະເພດທີສອງ: wire-wound motor string metal resistor;
ບໍ່ມີຫນ້າທີ່ຄວບຄຸມຄວາມໄວ, ແຕ່ມໍເຕີສາມາດເລີ່ມຕົ້ນໄດ້ເລື້ອຍໆ, ແລະຫຼັງຈາກເບກດ້ວຍພະລັງງານ thyristor, ມັນແມ່ນວິທີການຂັບລົດທົ່ວໄປສໍາລັບສາຍແອວລົງລຸ່ມ.
ປະເພດທີສາມ: ລະບຽບການຄວາມໄວ cascade ຂອງ motor winding.
ມັນມີຫນ້າທີ່ຂອງລະບຽບຄວາມໄວ, ສາມາດນໍາໃຊ້ສໍາລັບການຄວບຄຸມວົງປິດ, ແລະໂດຍທົ່ວໄປແລ້ວຖືກນໍາໃຊ້ໃນລໍາລຽງສາຍແອວຂະຫນາດໃຫຍ່ທີ່ມີໄລຍະທາງຍາວຫຼາຍກ່ວາ 1000m ແລະຫນ້າທີ່ຄວບຄຸມຄວາມໄວ.
ຂໍ້ໄດ້ປຽບ: ວິທີການຄວບຄຸມຄັ້ງທໍາອິດແລະທີສອງ, ໂຄງປະກອບການງ່າຍດາຍ, ວຽກງານບໍາລຸງຮັກສາຂະຫນາດນ້ອຍ, ການປະຕິບັດການເລີ່ມຕົ້ນອ່ອນທີ່ດີ, ລາຄາຕໍ່າ, ຜົນກະທົບຂະຫນາດນ້ອຍໃນຕາຂ່າຍໄຟຟ້າໃນເວລາທີ່ເລີ່ມຕົ້ນ, ຄວາມຫນ້າເຊື່ອຖືສູງ, ການປະຕິບັດການຄວບຄຸມທີ່ດີ; ຮູບແບບການຄວບຄຸມທີສາມມີການປະຕິບັດການເບກພະລັງງານທີ່ດີເລີດ.
ຂໍ້ເສຍ: ຮູບແບບການຄວບຄຸມທໍາອິດແລະທີສອງມີການບໍລິໂພກພະລັງງານຂະຫນາດໃຫຍ່ໃນເວລາທີ່ເລີ່ມຕົ້ນແລະຢຸດ; ລະບົບໂຫມດການຄວບຄຸມທີສາມແມ່ນສະລັບສັບຊ້ອນ, ແລະມີແນວໂນ້ມທີ່ຈະຖືກແທນທີ່ໂດຍຄວາມຖີ່ຂອງການສະຫຼັບຫຼືຄວາມຖີ່ສະຫຼັບ.
7. ມໍເຕີ DC ຄວາມໄວສູງ + ຕົວຫຼຸດຜ່ອນ
ຮູບແບບການຂັບຂີ່ທີ່ມີຟັງຊັນກົດລະບຽບຄວາມໄວ, ເຊິ່ງໂດຍທົ່ວໄປແລ້ວແມ່ນໃຊ້ໃນສາຍແອວຂະຫນາດໃຫຍ່ທີ່ຕ້ອງການຟັງຊັນຄວບຄຸມຄວາມໄວ.
ຂໍ້ໄດ້ປຽບ: ການປະຕິບັດການເລີ່ມຕົ້ນອ່ອນທີ່ດີ, ເສັ້ນໂຄ້ງຄວາມໄວທີ່ສາມາດຄວບຄຸມໄດ້ໃນລະຫວ່າງການເລີ່ມຕົ້ນ, ເສັ້ນໂຄ້ງຄວາມໄວທີ່ສາມາດຄວບຄຸມໄດ້ໃນເວລາທີ່ບ່ອນຈອດລົດ, ການປະຕິບັດການເບກໄຟຟ້າທີ່ດີ, ການປ່ຽນແປງຄວາມໄວ stepless, ການປະຕິບັດການຄວບຄຸມທີ່ດີເລີດ, ສາມາດຄວບຄຸມວົງປິດ, ຄວາມຫນ້າເຊື່ອຖືສູງ.
ຂໍ້ເສຍ: ລາຄາແມ່ນລາຄາແພງຫຼາຍ, ລະບົບ thyristor rectifier ແມ່ນສະລັບສັບຊ້ອນ, ອຸປະກອນຄວບຄຸມເອເລັກໂຕຣນິກກວມເອົາພື້ນທີ່ຂະຫນາດໃຫຍ່, ປັດໄຈພະລັງງານຕ່ໍາ, ມໍເຕີ DC ມີວົງແຫວນ, ແປງມີຂະຫນາດໃຫຍ່, ວຽກງານບໍາລຸງຮັກສາແມ່ນຂະຫນາດໃຫຍ່, ບໍ່ມີປະເພດຂອງການລະເບີດ, ແລະມັນບໍ່ສາມາດຖືກນໍາໃຊ້ໃນບໍ່ຖ່ານຫີນ.

8. ມໍເຕີ DC ຄວາມໄວຕ່ໍາໂດຍກົງຂັບເຄື່ອນ roller ຂັບຂອງສາຍແອວ conveyor
ຮູບແບບການຂັບຂີ່ທີ່ມີຫນ້າທີ່ຄວບຄຸມຄວາມໄວໂດຍທົ່ວໄປແມ່ນໃຊ້ໃນລໍາລຽງສາຍແອວຂະຫນາດໃຫຍ່ທີ່ຕ້ອງການຟັງຊັນຄວບຄຸມຄວາມໄວແລະລໍາລຽງສາຍແອວທີ່ມີພະລັງງານມໍເຕີດຽວຫຼາຍກ່ວາ 1000kw.
ຂໍ້ໄດ້ປຽບ: ການປະຕິບັດການເລີ່ມຕົ້ນອ່ອນທີ່ດີເລີດ, ເສັ້ນໂຄ້ງຄວາມໄວທີ່ສາມາດຄວບຄຸມໄດ້ໃນເວລາທີ່ເລີ່ມຕົ້ນ, ເສັ້ນໂຄ້ງຄວາມໄວທີ່ສາມາດຄວບຄຸມໄດ້ໃນເວລາທີ່ຈອດ, ການປະຕິບັດການເບກໄຟຟ້າທີ່ດີ, ການປ່ຽນແປງຄວາມໄວ stepless, ການປະຕິບັດການຄວບຄຸມທີ່ດີເລີດ, ການຄວບຄຸມວົງປິດ, ບໍ່ມີການຫຼຸດລົງ, ຄວາມຫນ້າເຊື່ອຖືສູງ.
ຂໍ້ເສຍ: ລາຄາແມ່ນລາຄາແພງຫຼາຍ, ລະບົບ rectifier thyristor ແມ່ນສະລັບສັບຊ້ອນ, ອຸປະກອນຄວບຄຸມເອເລັກໂຕຣນິກກວມເອົາພື້ນທີ່ຂະຫນາດໃຫຍ່, ປັດໃຈພະລັງງານຕ່ໍາ, ມໍເຕີ DC ມີວົງແຫວນ, ແປງແປງມີຂະຫນາດໃຫຍ່, ວຽກງານບໍາລຸງຮັກສາແມ່ນຂະຫນາດໃຫຍ່, ແລະປະເພດທີ່ບໍ່ມີການລະເບີດຂອງພະລັງງານສູງໃນປະຈຸບັນບໍ່ສາມາດຖືກນໍາໃຊ້ໃນຂຸດຄົ້ນບໍ່ຖ່ານຫີນ.
9. ຄວາມໄວການແປງຄວາມຖີ່ຄວບຄຸມ motor + reducer
ມີສອງວິທີການຄວບຄຸມສໍາລັບການແປງຄວາມຖີ່ຂອງມໍເຕີຄວາມໄວ + reducer:
ປະເພດທໍາອິດ: intersecting ແລະ alternating ການປ່ຽນແປງຄວາມຖີ່
ປັດໄຈພະລັງງານຂອງລະບົບການປ່ຽນຄວາມຖີ່ສະລັບແມ່ນຕໍ່າ, ແລະຈໍານວນການປະສົມກົມກຽວທີ່ມີຄໍາສັ່ງສູງຈະຖືກສ້າງຂຶ້ນໃນລະຫວ່າງການເລີ່ມຕົ້ນແລະການດໍາເນີນງານ, ເຊິ່ງຈະເຮັດໃຫ້ເກີດມົນລະພິດຕໍ່ຕາຂ່າຍໄຟຟ້າ. ການເລີ່ມຕົ້ນເລື້ອຍໆຂອງມໍເຕີຍັງຈະເຮັດໃຫ້ຜົນກະທົບຂອງພະລັງງານ reactive ຂະຫນາດໃຫຍ່ຢູ່ໃນຕາຂ່າຍໄຟຟ້າ, ເຊິ່ງຕ້ອງໄດ້ຮັບການຄຸ້ມຄອງຢ່າງສົມບູນ. ການລົງທຶນໃນອຸປະກອນການແປງຄວາມຖີ່ແມ່ນຂ້ອນຂ້າງຕໍ່າ.
ປະເພດທີສອງ: interchange ແມ່ນການປ່ຽນຄວາມຖີ່ສະຫຼັບ
ເນື່ອງຈາກຄວາມຈິງທີ່ວ່າລະບົບການແປງຄວາມຖີ່ສະລັບໄດ້ຖືກຕິດຕັ້ງດ້ວຍຕົວກອງແລະຫນ່ວຍຄ່າຊົດເຊີຍໃນອຸປະກອນ, ປັດໃຈພະລັງງານແມ່ນສູງກວ່າ 0.9, ອົງປະກອບປະສົມກົມກຽວທີ່ສູງກວ່າແມ່ນນ້ອຍຫຼາຍ, ແລະມັນຈະບໍ່ເຮັດໃຫ້ເກີດມົນລະພິດປະສົມກົມກຽວ, ແລະບໍ່ຈໍາເປັນຕ້ອງຕິດຕັ້ງອຸປະກອນການດູດຊຶມປະສົມກົມກຽວແລະອຸປະກອນການຊົດເຊີຍພະລັງງານປະຕິກິລິຢາ, ແຕ່ພະລັງງານດຽວແມ່ນຫຼາຍກ່ວາ 2000 frequency ລະບົບການແປງຂອງຈີນ, ປະຈຸບັນບໍ່ສາມາດຜະລິດໄດ້. ແລະອຸປະກອນແລະອາໄຫຼ່ຕ້ອງຖືກນໍາເຂົ້າ, ເຊິ່ງຂ້ອນຂ້າງສູງໃນການລົງທຶນຄັ້ງທໍາອິດ. ມັນຖືກນໍາໃຊ້ໂດຍທົ່ວໄປໃນ conveyors ສາຍແອວຂະຫນາດໃຫຍ່ທີ່ຕ້ອງການຫນ້າທີ່ຄວບຄຸມຄວາມໄວ.
ຂໍ້ໄດ້ປຽບ: ການປະຕິບັດການເລີ່ມຕົ້ນອ່ອນທີ່ດີເລີດ, ເສັ້ນໂຄ້ງຄວາມໄວທີ່ສາມາດຄວບຄຸມໄດ້ໃນເວລາທີ່ເລີ່ມຕົ້ນ, ເສັ້ນໂຄ້ງຄວາມໄວທີ່ສາມາດຄວບຄຸມໄດ້ໃນເວລາທີ່ບ່ອນຈອດລົດ, ການປະຕິບັດການເບກໄຟຟ້າທີ່ດີ, ການປ່ຽນແປງຄວາມໄວ stepless, ການປະຕິບັດການຄວບຄຸມທີ່ດີເລີດ, ການຄວບຄຸມວົງປິດ, ຄວາມຫນ້າເຊື່ອຖືສູງ.
ຂໍ້ເສຍ: ລາຄາແມ່ນລາຄາແພງຫຼາຍ, ອຸປະກອນຄວບຄຸມເອເລັກໂຕຣນິກກວມເອົາພື້ນທີ່ຂະຫນາດໃຫຍ່, ພະລັງງານດຽວໃນປະຈຸບັນແມ່ນຫຼາຍກ່ວາ 400kw ປະເພດທີ່ບໍ່ລະເບີດ, ບໍ່ສາມາດໃຊ້ໃນບໍ່ຖ່ານຫີນ.
ໂດຍຜ່ານການວິເຄາະຂ້າງເທິງຂໍ້ດີແລະຂໍ້ເສຍຂອງຮູບແບບການຂັບລົດຕ່າງໆຂອງສາຍແອວ conveyor, ໃນເວລາທີ່ເລືອກອຸປະກອນຂັບຂອງ conveyor ສາຍແອວ:
ສໍາລັບສາຍແອວ conveyors ບໍ່ຈໍາເປັນຕ້ອງມີລະບຽບຄວາມໄວແລະຄວາມຍາວຂອງສາຍແອວ conveyor ແມ່ນຫນ້ອຍກ່ວາ 1500m, Y-type motor + torque limiting fluid coupling + reducer ແມ່ນຮູບແບບການຂັບຂີ່ທີ່ຕ້ອງການ, ປະຕິບັດຕາມດ້ວຍ motor winding + reducer (ຮູບແບບການຄວບຄຸມແມ່ນ winding motor string ຕ້ານໂລຫະ);
ຖ້າຄວາມຍາວຂອງສາຍແອວສາຍແອວແມ່ນຍາວກວ່າ 1500m, ມໍເຕີປະເພດ Y + ອຸປະກອນຂັບ CST ແມ່ນວິທີການຂັບຂີ່ທີ່ຕ້ອງການ, ຕິດຕາມດ້ວຍມໍເຕີປະເພດ Y + ຄູ່ຂອງນ້ໍາຄວບຄຸມຄວາມໄວ + ເຄື່ອງຫຼຸດຜ່ອນ.
ໃນກໍລະນີທີ່ປະລິມານການຈາລະຈອນຂອງສາຍແອວ conveyor ມີການປ່ຽນແປງຢ່າງຫຼວງຫຼາຍແລະລະບຽບການຄວາມໄວແມ່ນຕ້ອງການ, ການແປງຄວາມຖີ່ຂອງລະບຽບຄວາມໄວ motor + reducer ເປັນວິທີການຂັບລົດທີ່ຕ້ອງການຂອງຕົນ, ປະຕິບັດຕາມກົດລະບຽບ cascade ຄວາມໄວ + ການຫຼຸດຜ່ອນ motor winding ໄດ້.











